Hug-A-Bear
I’m currently leading a project to design and build a robotic teddy bear to hug children with separation anxiety and panic disorders as part of Volunteers for Medical Engineering, described in my About section.
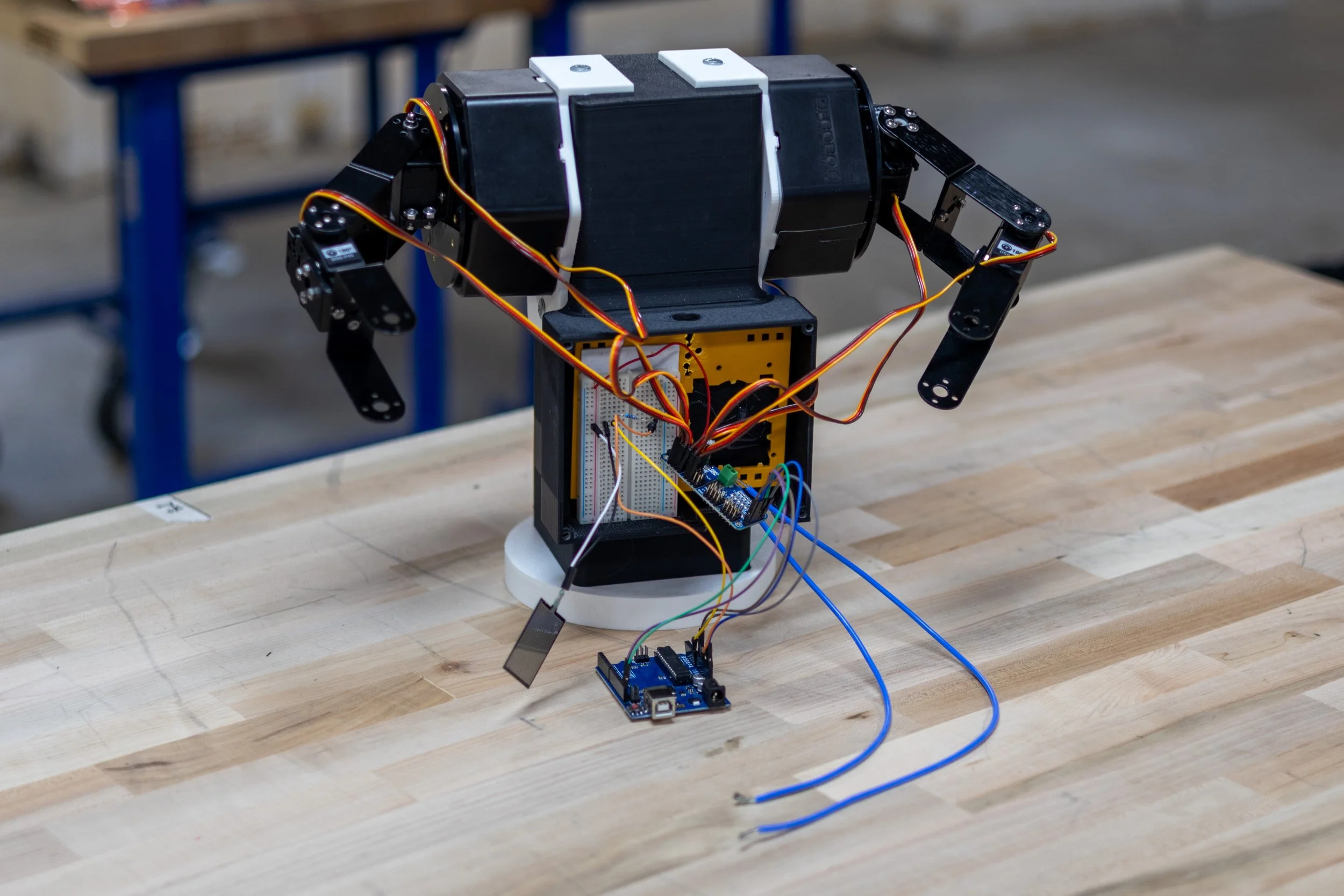
Much of the work for this project has been programming an Arduino to control the robot system. The robot’s components include an Arduino Uno, a PWM servo driver, 6-degree-of-freedom robotic arms from DFRobot that feature high-torque servo motors, and force sensors (or force sensitive resistors). We’ve been prototyping using a power supply and a breadboard, but will use rechargeable NiMH batteries and solder all components for the final, packaged bear.
When switched on, the bear functions by detecting a child’s hug, responding with its own hug, and then releasing after a few seconds or when the child initiates release, whichever comes first. Throughout the project, I’ve made sure to keep the importance of safety and user needs in mind, and continue to ensure proper wiring and power supply/delivery, as well as appropriate size, weight, and hug strength.